






Робот-танк Xiao-r XR-Jetson NANO SLAM ROS Ladar Robot car (конструктор)
Технические характеристики Xiao-r XR-Jetson NANO SLAM ROS Ladar Robot car
| Плата управления | Jetson NANO |
| Программирование | Python, C++ |
| Двигатель | щелочной двигатель постоянного тока |
| Камера | 1080 HD |
| Дисплей | 7" сенсорный дисплей |
| Среда разработки | Ubuntu 18.04 |
| Сетевая карта | Intel8625 |
| Привод | STM32F105 |
| Крутящий момент | 3.5 Нм |
| Гироскоп | да (9 осей) |
| Лидар | XR_Lidar S1 |
| Функциональные возможности | планирование траектории лазерного лидара, автоматическое предотвращение препятствий, построение карты помещения с помощью лазерного лидара, следование по заданной траектории и многое другое |
| Характеристики Jetson Nano | |
| Процессор | Arm A57 с тактовой частотой 1,43 ГГц, 4 ядра |
| Видеокарта | Maxwell, 128 ядер |
| Системная память | 4 Гб LPDDR4, 64-bit 25,6 Гбит/с |
| Слот для карт памяти microSD | да |
| Кодирование видео | 4К с частотой 30 Гц 4 потока в разрешении 1080p с частотой 30 Гц 9 потоков в разрешении 720p с частотой 30 Гц (H. 264/H. 265) |
| Декодирование видео | 4К с частотой 60 Гц 2 потока в разрешении 4K с частотой 30 Гц 8 потоков в разрешении 1080p с частотой 30 Гц 18 потоков в разрешении 720p с частотой 30 Гц (H.264/H.265) |
| Камера | 2 полосы MIPI CSI-2 DPHY |
| Подключение | Gigabit Ethernet, M.2 Key E |
| Поддерживаемые интерфейсы | USB 3.0, USB 2.0 Micro-BHDMI, DP, GPIO, I2C, I2S, SPI, UART |
| Характеристики XR_Lidar S1 | |
| Расстояние сканирования | 0.8 метров |
| Сканирование | 360° |
| Частота измерения | 3860 раз/сек |
| Класс лазера | I |
| Общие характеристики | |
| Материал | алюминиевый сплав |
| Интерфейс | USB/HDMI |
| Источник питания | литиевая батарея 2200 мАч |
| Габариты | 280 х 242 х 300 мм |
| Вес | ∼ 3.5 кг |
| Комплектация | |
| плата Jetson Nano – 1 шт | |
| модуль питания платы – 1 шт | |
| лидар – 1 шт | |
| камера 1080p – 1 шт | |
| беспроводная клавиатура с тачпадом 2,4G – 1 шт | |
| дисплей 7 " – 1 шт | |
| карта памяти 64 Гб – 1 шт | |
| 9-осевой гироскоп – 1 шт | |
| набор деталей для сборки шасси с гусеницами – 1 шт | |
| акриловый каркас 1 – 1 шт | |
| акриловый каркас 2 – 1 шт | |
| аккумуляторная батарея – 1 шт | |
| адаптер питания – 1 шт | |
| кабель HDMI – 1 шт | |
| кабель USB – 1 шт | |
| сетевая карта – 1 шт | |
| антенна – 2 шт | |
| липучка – 2 шт | |
| двухсторонний держатель крепления корпуса M3*45 – 4 шт | |
| двухсторонний держатель крепления корпуса M3*25 – 4 шт | |
| держатель крепления корпуса M3 – 4 шт | |
| держатель крепления корпуса M2.5 – 8 шт | |
| винт M3 – 15 шт | |
| винт M2.5 – 8 шт | |
| винт M3*16 – 4 шт | |
| винт M2 – 4 шт | |
| гайка M3 – 15 шт | |
| гайка M2 – 4 шт | |
| гайка M2.5 – 4 шт | |
| гайки – 12 шт | |
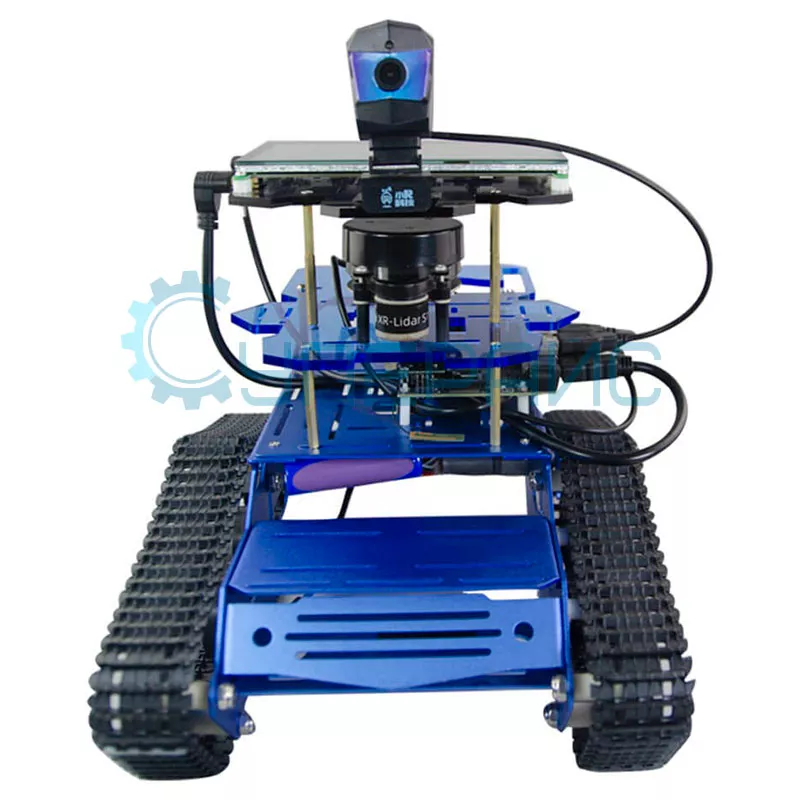
Роботизированный танк Xiao-r XR-Jetson NANO SLAM ROS Ladar Robot car (конструктор)
Робот-танк Xiao-r XR-Jetson NANO SLAM ROS Lidar Robot car представляет собой конструктор, который подходит для пользователей, знакомых с основами робототехники и программирования. Модель снабжена платой управления Jetson NANO и поддерживает программирование на Python и C++. Такие роботы танки-машины Xiao-r подходят для обучающихся робототехнике, инженеров и разработчиков, желающих воплотить идеи на практике.
Выбор щелочного двигателя постоянного тока обуславливает необходимую мощность для выполнения моделью различных манёвров. Устройство дополняет 7-дюймовый сенсорный дисплей: с роботом удобно взаимодействовать, меняя настройки.
Камера 1080 HD даёт высококачественную визуализацию, что полезно для экспериментов и анализа. Среда разработки Ubuntu 18.04 предоставляет доступ к богатому набору инструментов для разработки приложений.
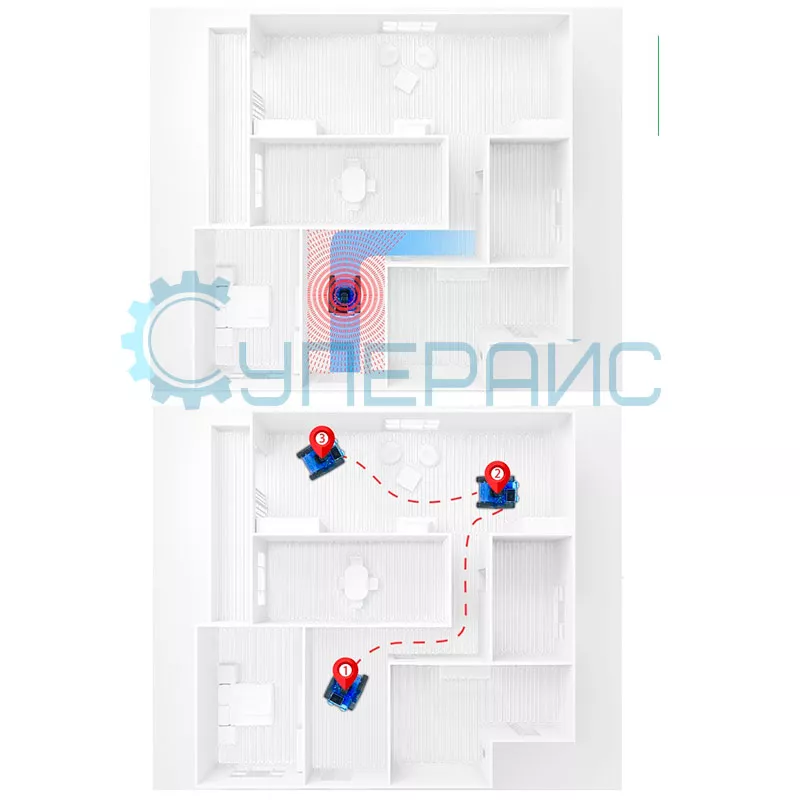
Сетевая карта Intel8625 обеспечивает стабильное соединение. Лазерный лидар помогает роботу планировать траекторию движения и строить карты помещений. Автоматическое обнаружение препятствий и следование заданной траектории делают устройство подходящим для работы по различным сценариям.
Установлен литиевый аккумулятор ёмкостью 2200 мАч, который обеспечивает длительное время автономной работы. Корпус выполнен из алюминиевого сплава, конструкция прочная и надёжная. Благодаря функциональным возможностям такая модель может использоваться для учебных занятий и научных экспериментов.
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельное программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Технические характеристики, внешний вид и комплектация товара могут быть изменены производителем без предварительного уведомления.

